
Projects
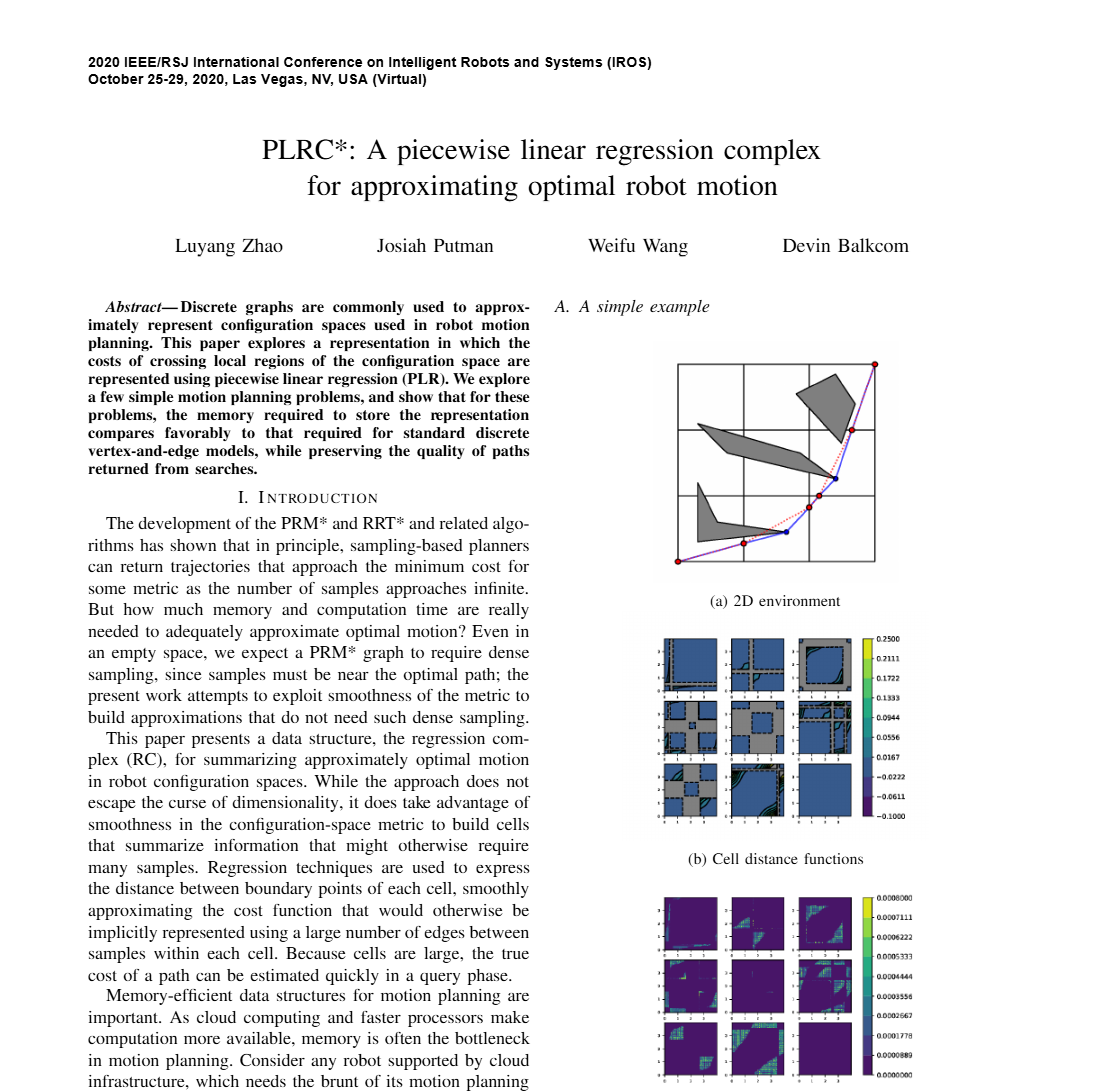
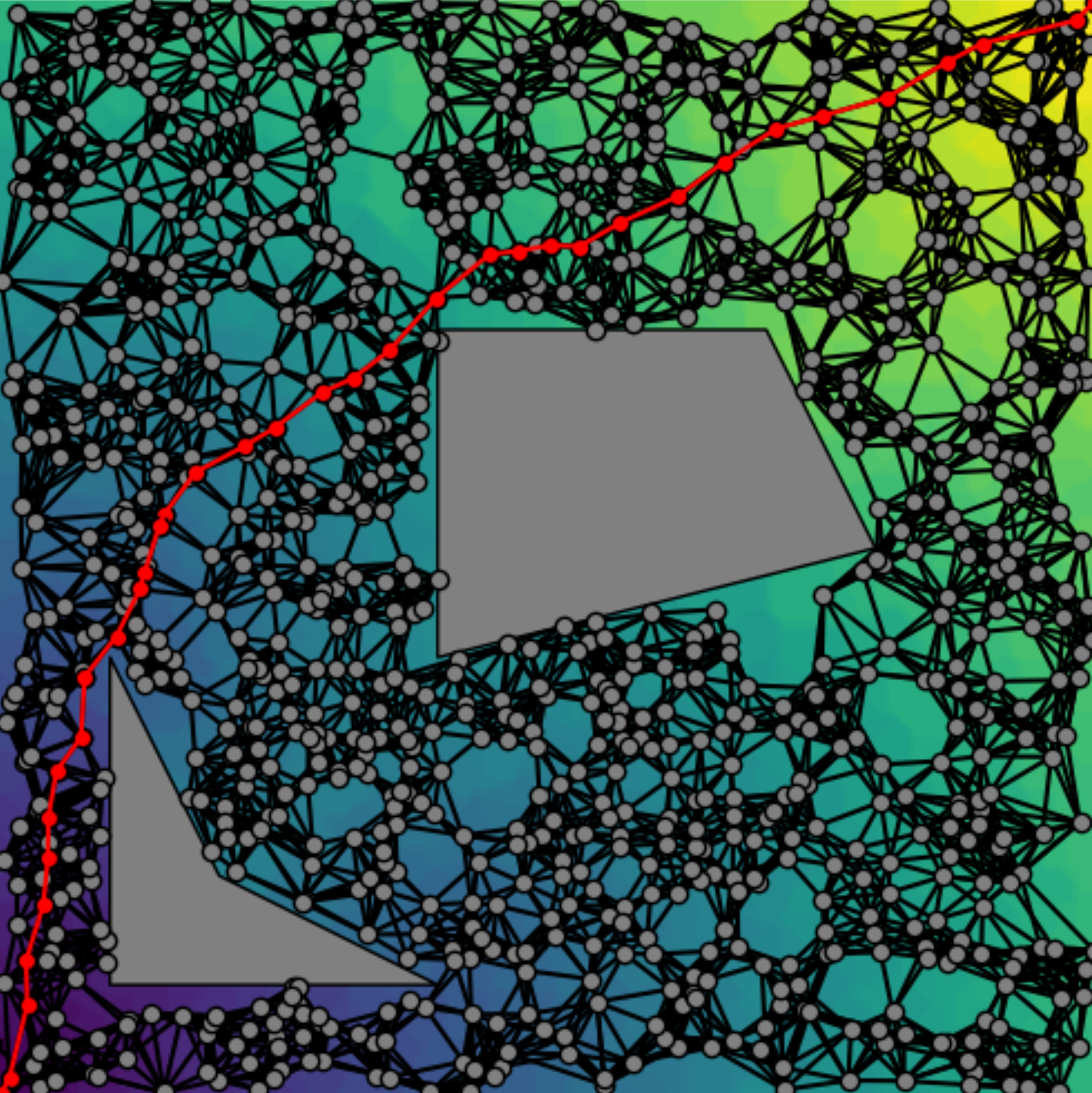
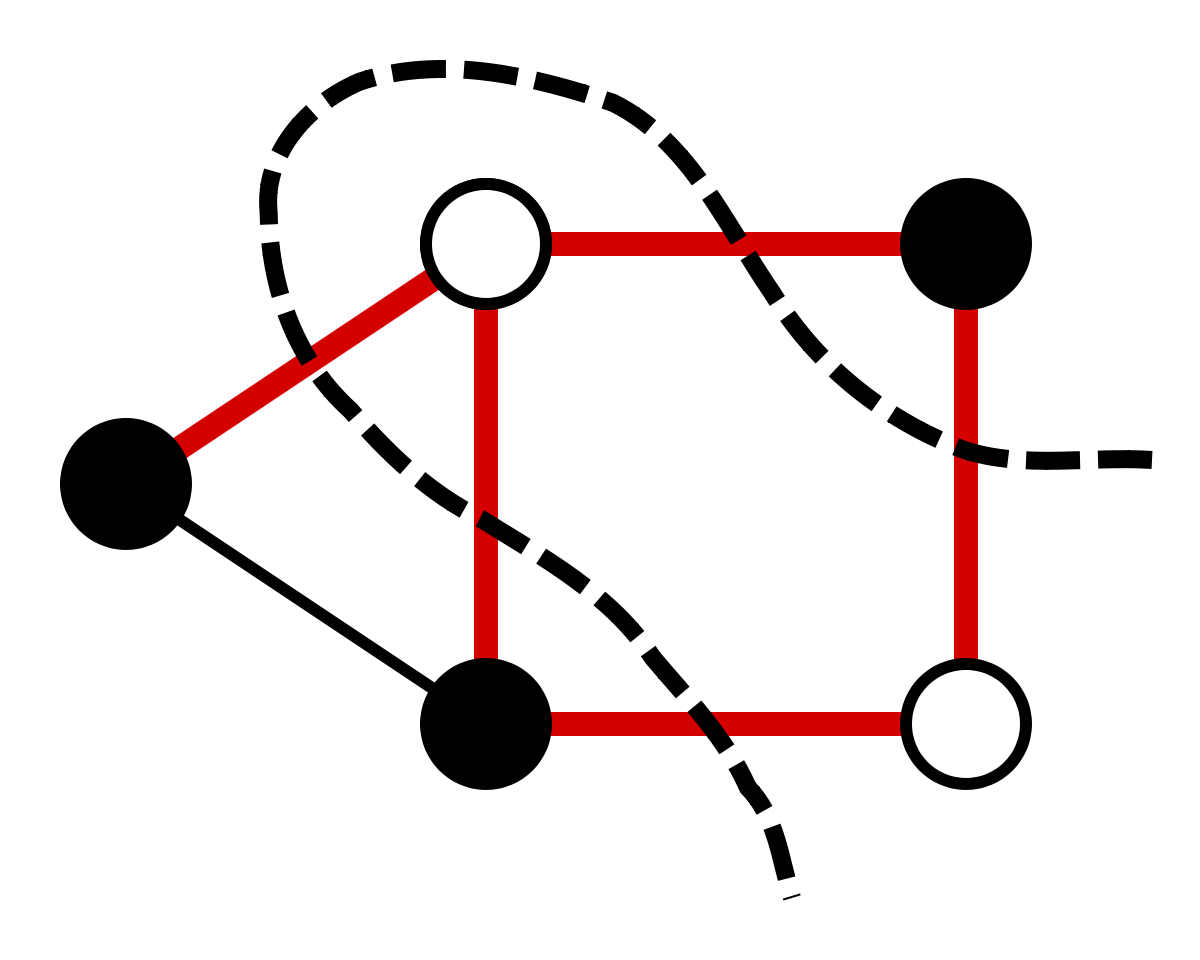
PLRC* For Motion Planning
A piecewise linear regression complex for approximating optimal robot motion. Publication in IROS 2020.

Kataru
Kataru 「カタル」is a system for interactive dialogue based on YAML, parsed in Rust.
Kataru is similar to Twine and Yarn Spinner except with more support for organizing passages and sharing common functionality across multiple characters.
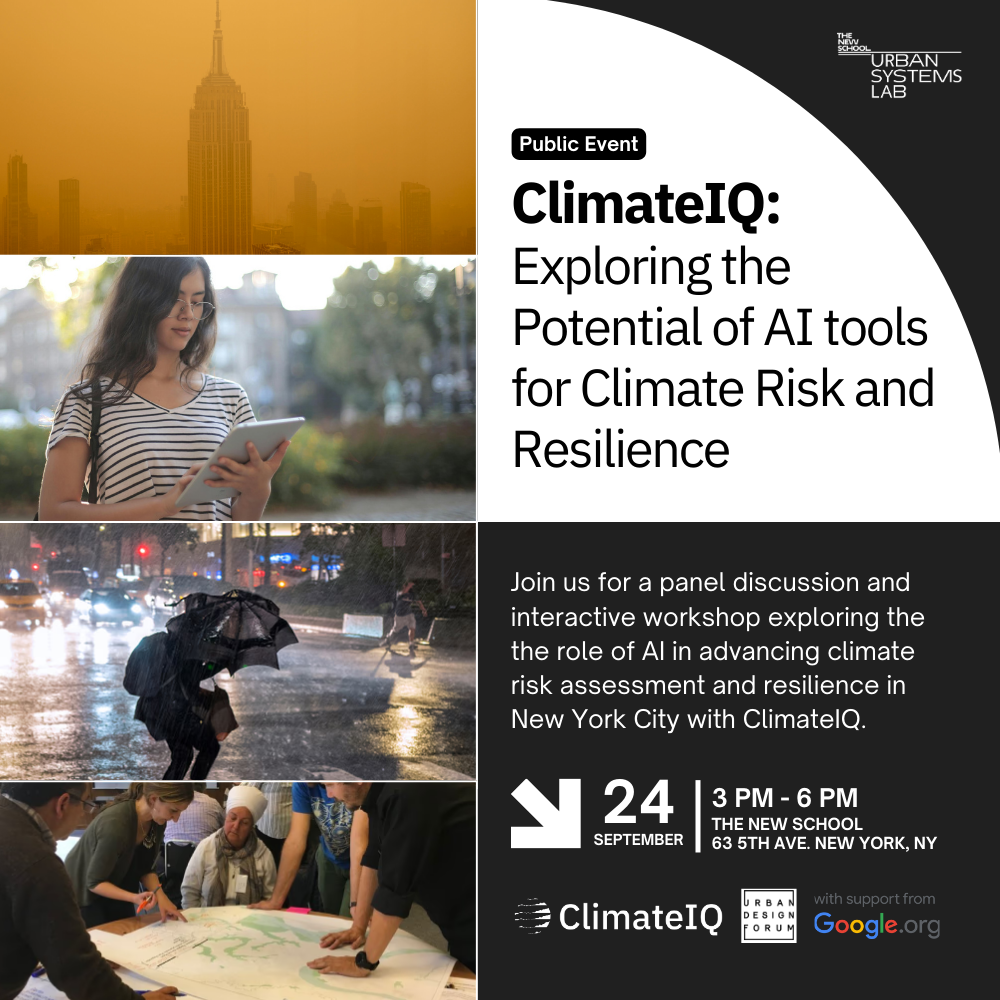
ClimateIQ
ClimateIQ helps city planners and communities prioritize local adaptations to climate hazards, using advanced climate models and machine learning to identify the areas most at risk.
I helped architect and develop novel ConvLSTM networks to perform flood an datompsheric predictions with less than 5% of the compute required by physics based models.
MotionPlanning.jl
Julia library for simulated robotic motion planning.
PlanarMaxCut.jl
Julia implementation of polynomial-time max cut on planar graphs.
Robotic laundry folding
Leverage deep learning to produce predictions on par with physics-based simulations.